Time: December 6th, 2017
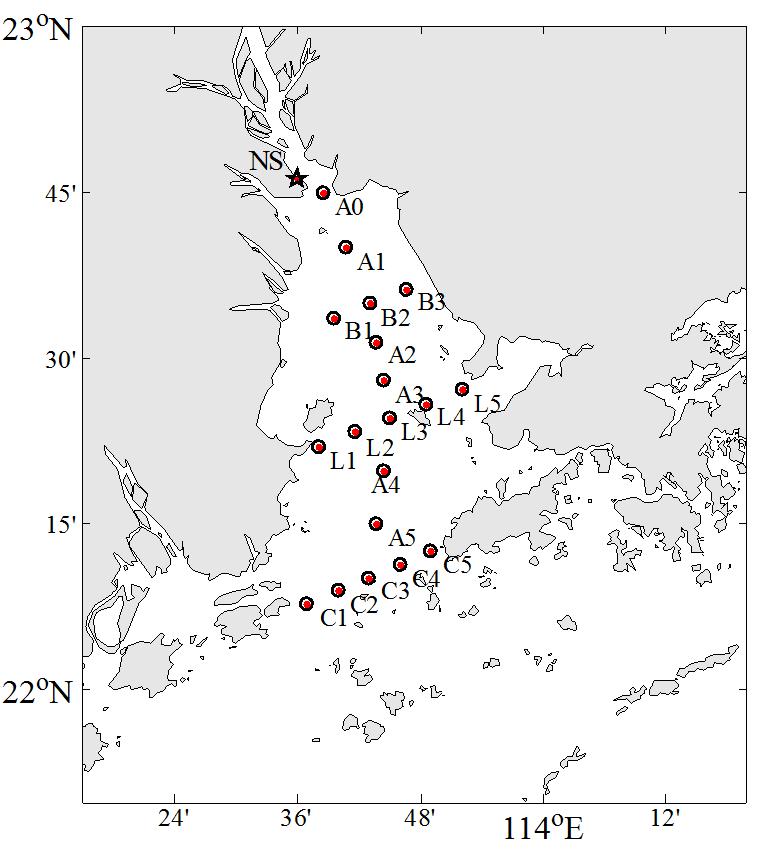
Location: The L section in the middle of the Pearl River estuary
Facility: M75 multifunctional USV, YSI EXO2 Multiparameter water quality sonde, ADCP
User: Hong Kong University of Science and Technology (HKUST)
Working area:

Main process:
The M75 set sail from the west side of the Pearl River Estuary and traveled along the L section at a speed of lower than 6 knots, the maximum acceptable speed of the ADCP. After arriving at the last survey point L5, M75 returned along the original route.

Survey route of M75 USV
The M75 hovered at each survey point , from L1 to L5, for 10 minutes. The operator compared the data of the ADCP while the USV is sailing and hovering to reduce deviation.
In this application, the ADCP is mounted on the bow and the EXO2 is mounted on the right side of the boat.


ADCP mounting Water sonde mounting
After the on-site survey, data collected was analyzed and processed. The result showed that the data was in a good quality for the distribution and changes were logical. The survey result meets the team’s expectation.
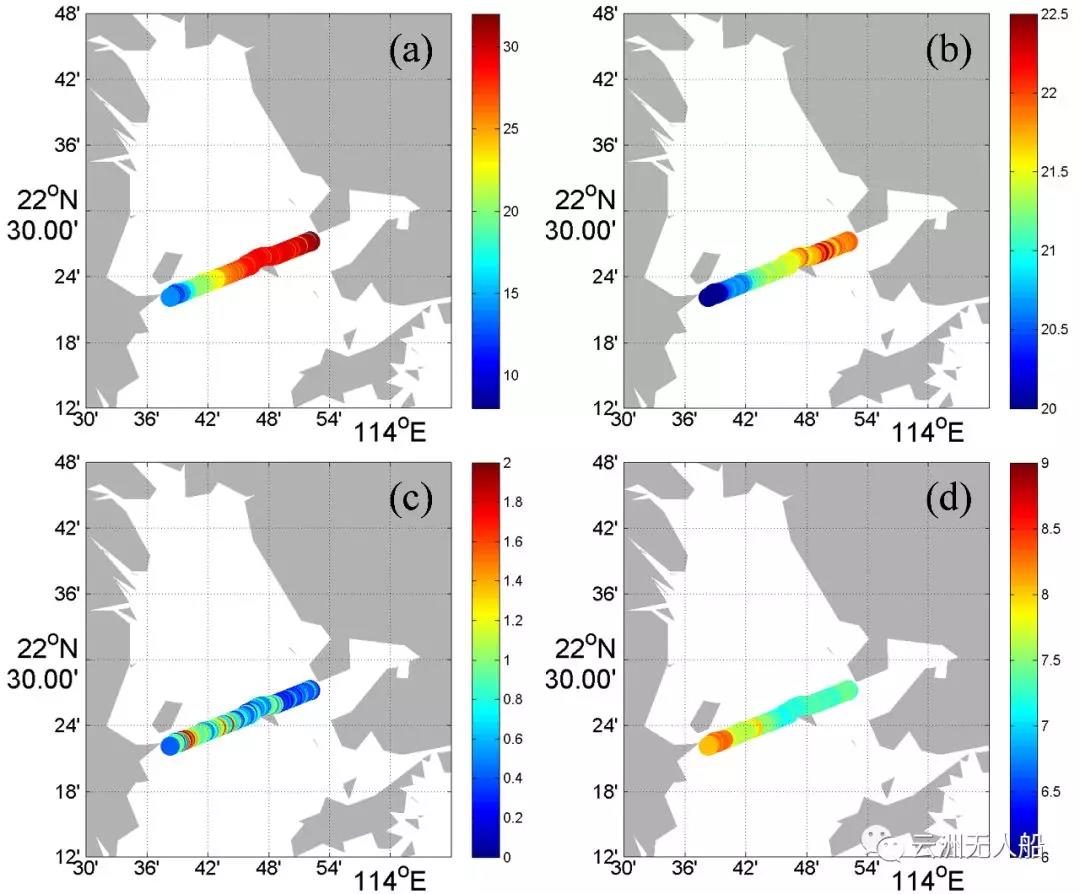
Water surface(a) salinity, (b) temperature, (c) chlorophyll and (d) dissolved oxygen distribution along the observation section (outbound)
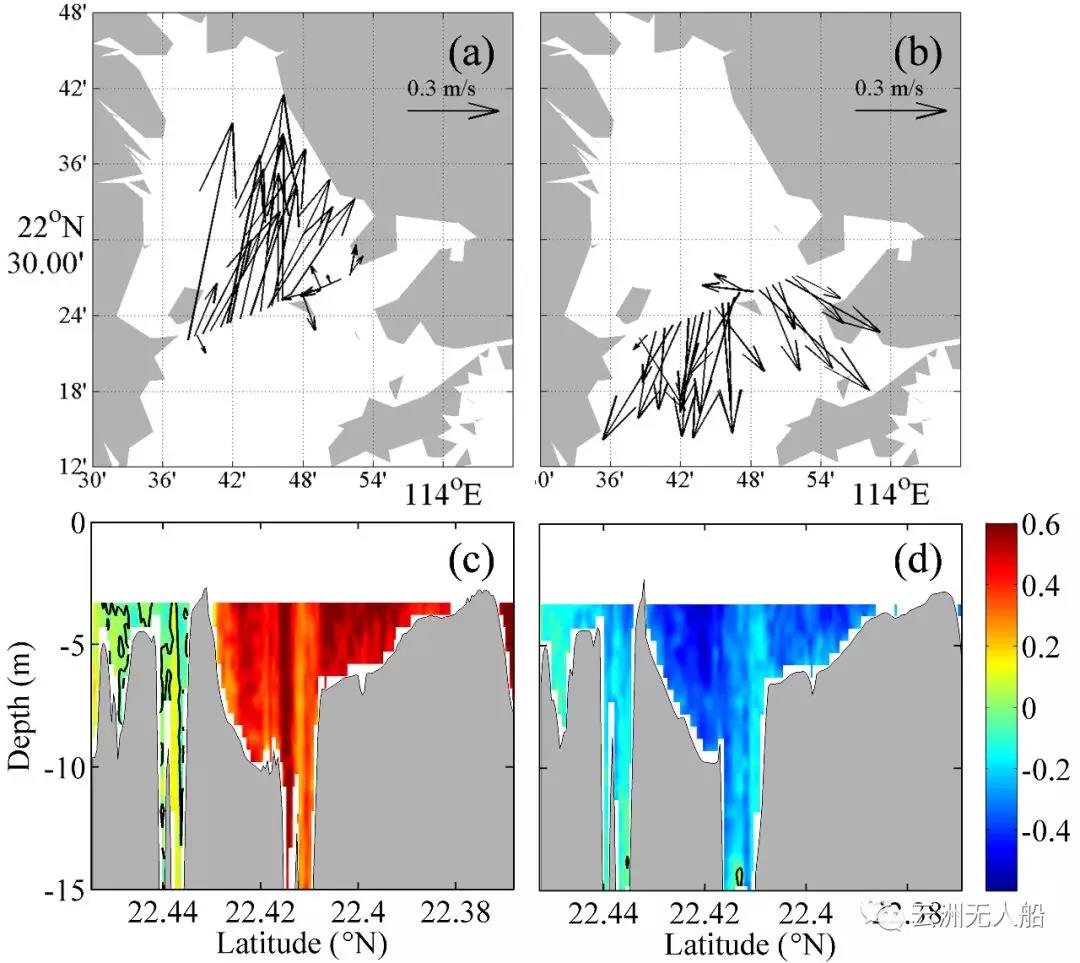
Flow distribution of water surface from the (a) going and (b) returning route.
Flow distribution of the North-south direction from the (c) going and (d) returning route.
The data is a good reflection of the physical and chemical situation of the Pearl River Estuary in winter. Since the hull of the unmanned boat is non-metallic, the frame for the ADCP is made of aluminum alloy, there’s very little interference to the ADCP so it provides a very high quality data during sailing.
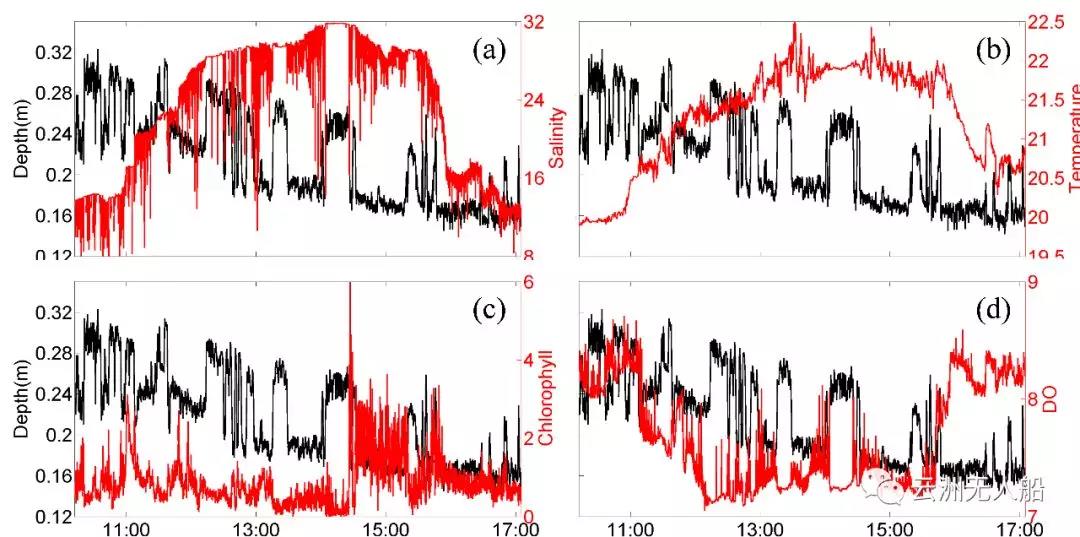
EXO2 data: (a) salinity, (b) temperature, (c) chlorophyll, (d) dissolved oxygen and the sensor depth change over time. The red line represents each variable and the black line represents the depth of the sensor under water.
Conclusion:
In this application, the users operated the USV and survey instruments by the wireless network from a mother ship. All instruments were working stably and normally.
The result proved that the USV has the advantage of precise navigation and flexible control. The instruments operated properly on the USV, the collected data was of good quality, and some were even of higher quality than those collected by traditional survey mode with research ship. The application of USV for marine research is an effective means to improve the quality and efficiency of ocean observation.