Date: April 18, 2019
Location: A River Section Near Dongjin Bridge in Xiangyang City, Wuhan
Facility: SL40 Autonomous Survey USV
River condition: Relatively strong wind, waves over 10cm high, with ships passing by.
Mission: Utilize the SL40 USV to survey the underwater topography and section of this river sector systematically to generate a three-dimensional coordinate system for later mapping processing
Survey area
The survey area is 1km away from Dongjin bridge, around 25m long and 200m wide, the water depth is majorly between 2m to 4.5m, the flow velocity is about 0.6m/s. This section is a navigable section with vessels constantly passing by. The survey area is shown below:

Pic 1-1 Satellite map of the survey area
Facility
The SL40 Autonomous Survey USV
The SL40 Autonomous Survey USV is a new generation of survey vessel integrating navigation system, GNSS Global Positioning System and highly accurate bathymetric surveying system. It has the following advantages compared with a tradition survey boat:
- The USV can navigate autonomously with the built-in navigation module. With a light hull weight and low draft, it can survey on shoals, reef areas and other dangerous places with great flexibility, saving labor cost, improving working efficiency and personal safety.
- In a traditional surveying mode, it’s never easy to find a suitable survey boat to work on different water environments, either on suburb rivers or on remote reservoirs. An unmanned surface vessel weighing only 30kg can be transported by a car or lifted by two people with ease, which can save lots of time and effort from boat selecting, renting and transportation.
- The USV can navigate and survey autonomously tocomply with the survey line with high accuracy.
- The USV can be mounted with GNSS receiver, ADCP, side scan sonar and other sensors basing on different requirementsto achieve different functions, such as bathymetric surveying and water quality monitoring.
- The survey data can be stored on the USV during the survey process.
USV Parameter
| Dimensions | 1650*700*400 mm |
| Weight | 35 kg |
| Material | Carbon fiber |
| Communication | Radio and network |
| Communication Range | Remote control 1km Data Telemetry 2km |
| Maximum Speed | 5m/s |
| Payload | 15kg |
| Video Monitoring | Yes |
| Collision Avoidance | Yes |
| Multi Missions | Yes |
Problems can be solved by the unmanned boat surveying system:
- On unnavigable water areas like reservoirs andsomeinland rivers:
- The manned boat can’treach a specific survey area by sailing, which can cost lots of time and labor to transport the boat to the target spot.
- On shoals, shallow water, and reef area:
- The manned boat can’tsail smoothly because of the deep draft.
- The manned boat is inflexible enough to collect complete data and surveyorshave to collect data
- Surveying on unclear water area manually care can post threats to personal safety.
- On polluted water area:
- The polluted environment can be hazardous to the human body.
Application area
- Survey of underwater topography and sections of rivers, lakes, reservoirs, etc.;
- Reservoircapacity measurement;
- Hydrological survey;
Positioning terminal
Mobile Station: Southern Galaxy 1
Base Station: Southern Galaxy 6
Software
Southern Freedom software, dedicated for unmanned boat operation, integrates functions including USV navigation, data collecting, storing and post-processing.
Execution
Process
- Connect hardware of the USV and test the software.
- Set up the base station.
- Input coordinate parameters to the software.
- Drive the USV to sail along the bank to specify survey area. Set up survey lines manually, upload survey lines and get the USV to start navigating and surveying automatically. Users can also measure the survey area with a drone to draw a dxf2000 map and input to the software for survey line setup.
- Process and delete false bathymetric data.
- Modify data thenoutput.
- Use the Southern Cass software to generate a map.
Result
Data output
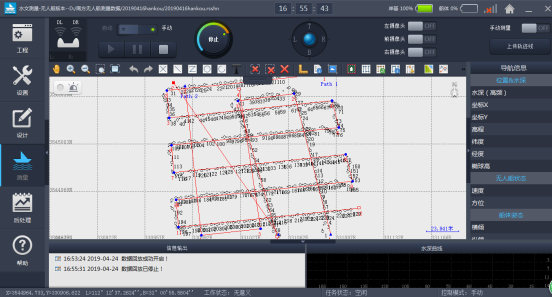
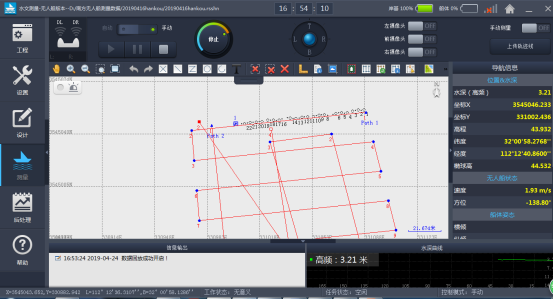
Pic 6-1 Autonomous survey lines of the USV
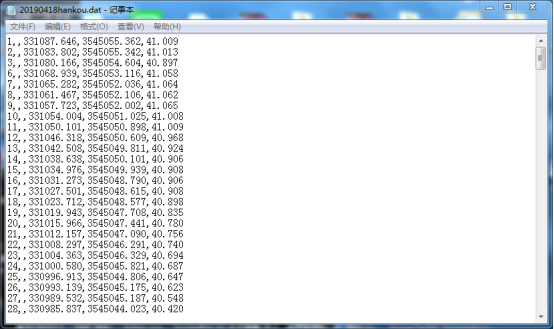
Pic 6-2 Southern Cass data (.dat format)

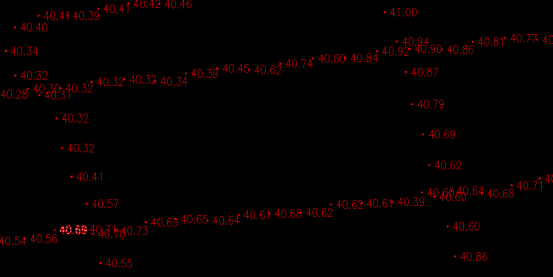
Pic 6-3 Custom data output
Topography data output
Pic 6-4 Crosspoint data comparison
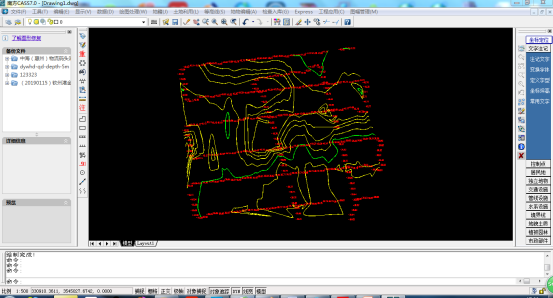
Pic 6-5 1:500 topography may in 0.2 m contour
Summary
The SE40 Autonomous Survey USV complied its mission successfully in this task. It’s proved that the USV is easy to be transported, set up and operated. It can be applied to underwater topography survey and provide basic data support for river management, regulation, and silt cleaning.