Background
According to a customized requirement for offshore geomagnetic observation, OceanAlpha developed an M40P unmanned surface vessel (USV) based on the M40 USV. Compared with the basic version, the M40P USV is larger and equipped with an automatic winch to launch and retract the magnetometer.
The M40P USV also has an automatic homing function and the homing radius can be adjusted within the range of 1km. It can automatically maintain its position at sea for no less than 20 days and can work normally in sea conditions with a wave height of 2m.

M40P working on the sea
Survey process
The observation was carried out in the waters near Wanshan Island. The average water depth is 23m, and the average flow velocity is 2kn. M40P carried out its observation task in a circle with a radius of 1km.
After arriving at the center of the circle, the power of M40P automatically turned off. Engineers used the shore-side base station software to control the automatic winch to lower the magnetometer. On the first day, the magnetometer was lowered to a depth of 5m underwater and left for 24 hours. On the second day, it was lowered to 10m underwater for 24 hours. on the third day 15m for 24 hours and on the fourth day 20m for 24 hours.
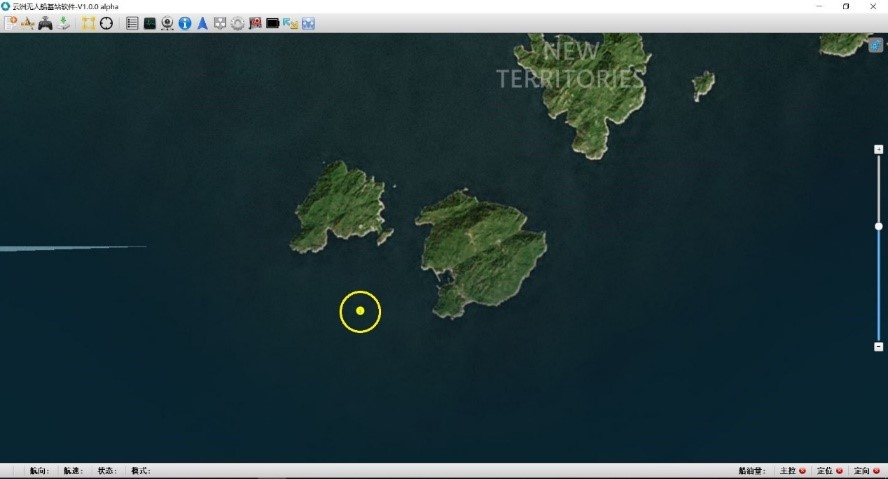
Circle setting in the USV control software
M40P moved with ocean currents. When drifted away from the circle, its thruster automatically turns on to bring the USV back to the center of the circle. After reaching the center, the thruster turns off again. In this way, the M40P USV kept repeating the cyclic drift-off movement.
M40P contains three 48V 60Ah ternary lithium batteries and is equipped with four solar power panels. When the battery power is lower than 30%, the generator automatically starts to charge the battery and stops when the power reaches 80%. Users can monitor the power generation of solar power panels in real-time through the software.
In this observation, M40P worked continuously at sea for 96 hours. The average sea state was level 3, the average wave height was 1 meter, and the maximum wave height was over 2 meters. The average drift speed of the USV was 1 knot, and its performance was stable throughout the whole process. The USV has excellently fulfilled the designed requirements of operating in high sea conditions.
Regardless of the magnetic field interference before entering and leaving the water, it can be seen from the uninterrupted magnetometer data graph that the overall magnetic value is stable around 45000nT with small changes. The small jump points are the magnetic interference caused by passing fishing boats.
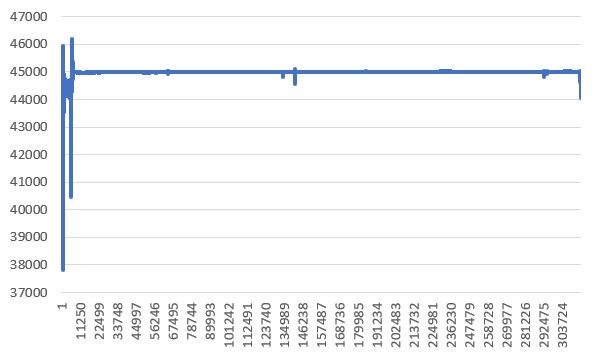
Continuous data of 4 days
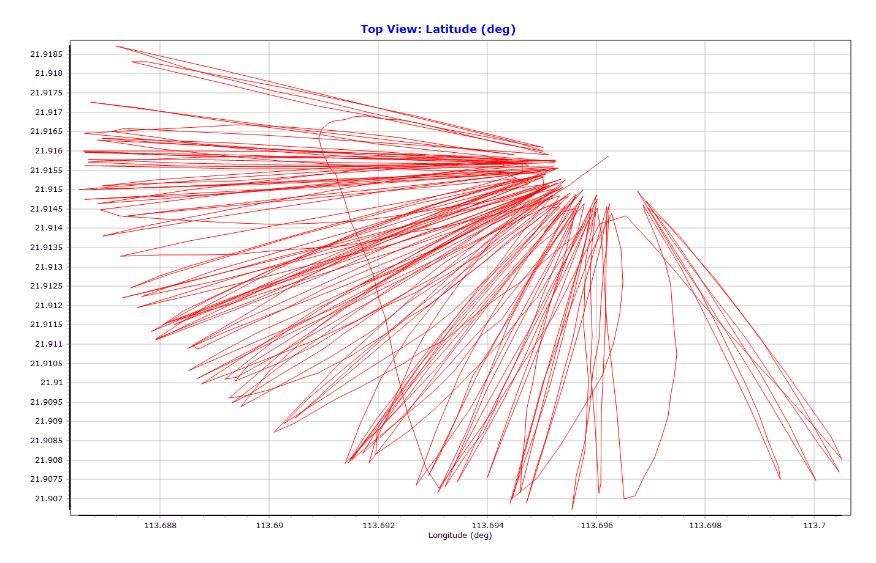
Movement trajectories of the USV