Surveying in shallow muddy areas, narrow creeks, and around structures that are impossible to approach with the conventional craft has always been a frightening mission for hydrographic surveyors.
Spending hours on a rickety rubber boat or setting foot into turbid waters in person are both dangerous and tiring. However, hard work does not necessarily guarantee good data quality.
The scene is now being refined by OceanAlpha’s portable unmanned surface vehicle, SL20, a 1-meter-long water drone boat that comes with an autonomous navigation system and communication system. After mounting a single beam echo sounder, it can sail autonomously according to the pre-set route and send back bathymetric and position data in real-time.

In September 2021, our user from Echogram s.c. Poland carried out another agreeable bathymetric survey to a shore dock area with their SL20 USV.
An RV was creatively transformed into a mobile survey station to transport the USV around and shield surveyors from the sun and rains while waiting for USV to get its job done.

A lattice-like survey route was quickly drawn with the USV navigation system on a laptop on the RV, and the USV started to sail automatically after receiving the route instruction from the shore base via wireless communication. The surveyor used the same laptop to run the hydrologic software and monitor real-time data.
The SL20 is small and maneuverable enough to navigate right next to and under the pier to achieve a full-cover data acquisition, while these areas are unreachable by manned vessels.
“As a result of the great cooperation of two GNSS RTK receivers (base and rover) and navigation algorithm of USV, we get perfectly straight survey lines,” commented Maciej Lang, surveyor of Echogram. Streamline hull design and smooth propulsion system are as well key factors to achieve stable navigation with a such small vessel.

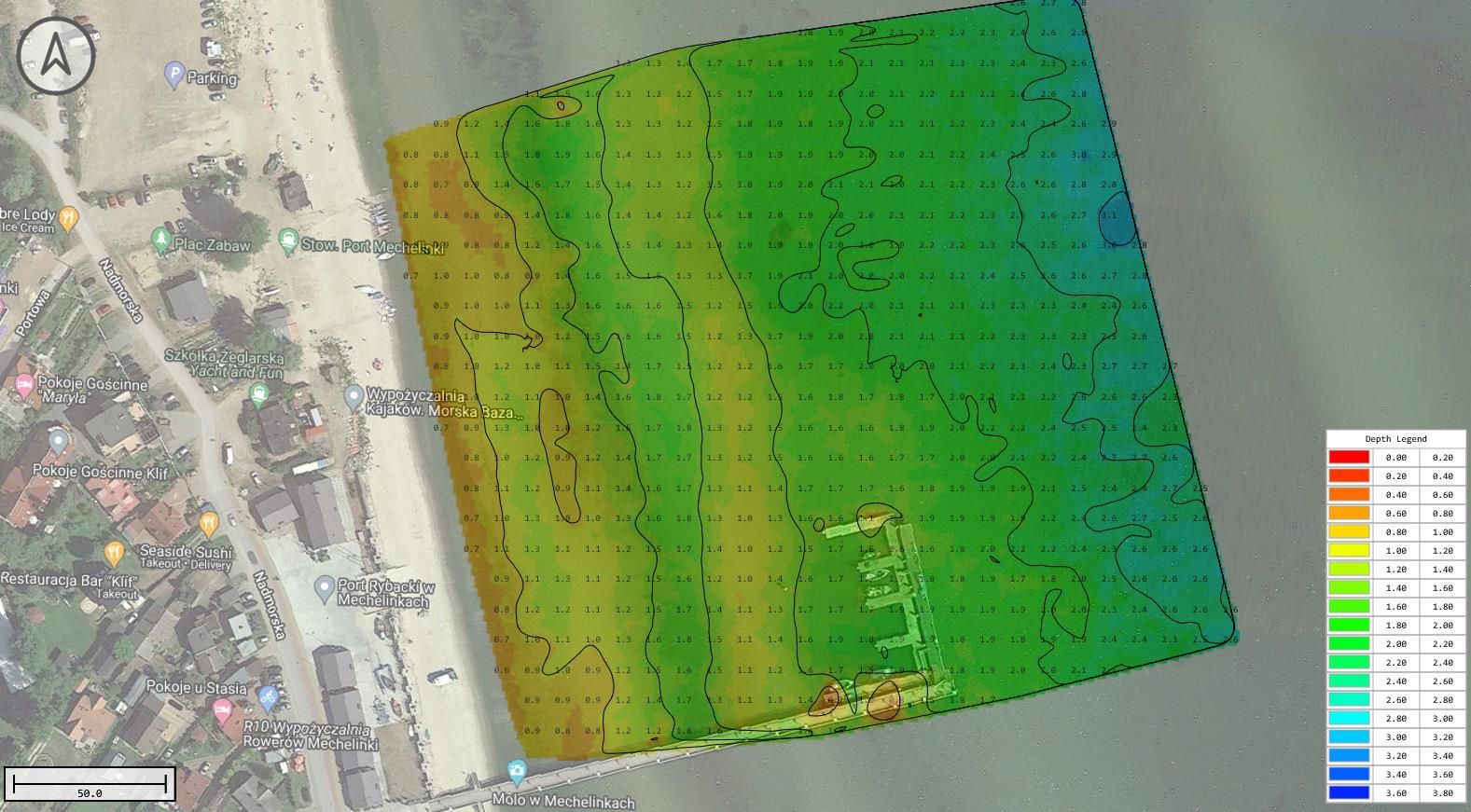
The actual navigation route of SL20
The GPS output is logged and an XYZ data file is produced and then combined with depth data obtained from the sounder on the USV. The resultant composite data is then used to create contours views and color-coded charts to show water depth distribution; red shows shallow places that are dangerous for manned boats to enter, green are deeper and safe, and blue is the deepest.
Related Applications
We’d love to hear from you
Whether you have a question about features, trials, pricing, need a demo, or anything else, our team is ready to answer all your questions.
