Location: A dangerous section of Longwan bridge in Foshan city and the harbors of Taishan power station in Tangshan bay, Taishan city
Date: April 25-28, 2018
Instrument: Oceanalpha M40 USV
Ping DSP 3DSS-DX-540 3D sidescan sonar
Beijing Zhuhai Putonghua MS-400 multibeam sounding system
User: Guangdong Banting Survey Technology Co., Ltd.
Instruments overview:
In this mission, the M40 USV is deployed with a 3DSS-DX-450 3D side scan sonar, an MS-400 multibeam sounding system, a wave master navigation system and a wireless broadband antenna. Receiving mission commands from the base station, the USV start to sail on the pre-set survey line and automatically controls the above instruments to conduct bathymetric survey and underwater topography survey .
Case details
Survey area
The mission consisted of both watercourse survey and harbor basin survey.
The condition of the watercourse
Survey area around Longwan bridge, Foshan city(The red frame area)
The survey area includes both the upper and lower reach of the Longwan bridge and covers approximately 1 square kilometer. The water depth ranges from 2 meter to 5 meter.
2. Condition of the harbor basin
Survey areas in Taishan harbor (The red frame area)
The basin is within the Taishan power station harbor, which is divided into two parts: a smaller one of 2-6m depth, and a bigger one of 9-15m depth. Due to the dredging work carried out in the larger basin, which would post huge impact on the acoustic equipment, the survey is mainly conducted in the smaller basin.
Main process
Two M40 USVs are transported and launched by an integrated crane. 

When surveying the watercourse in Foshan, the base station and communication antenna were set up under the Longwan bridge to ensure the signal coverage of both reaches. After simple testings, the USVs received commands from the base station and start to survey. It took the USVs five hours to complete the task at an average speed of 4 knots. After docked, the USVs were hooked to the crane and got lift up to the truck.
Operators working under the bridge

The survey line of the unmanned boat set on the base station
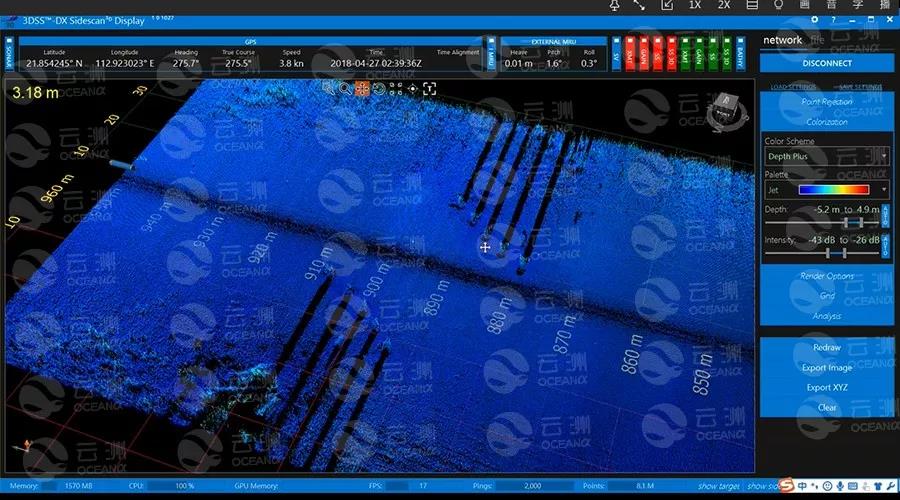
Ping 3D side scan sonar performance analysis
As can be seen on the real-time data, the data points of the 3D side scan sonar has a high density and the image is clear and delicate. The sonar with a span width of up to 10 times of the water depth greatly improves the survey efficiency and accuracy.
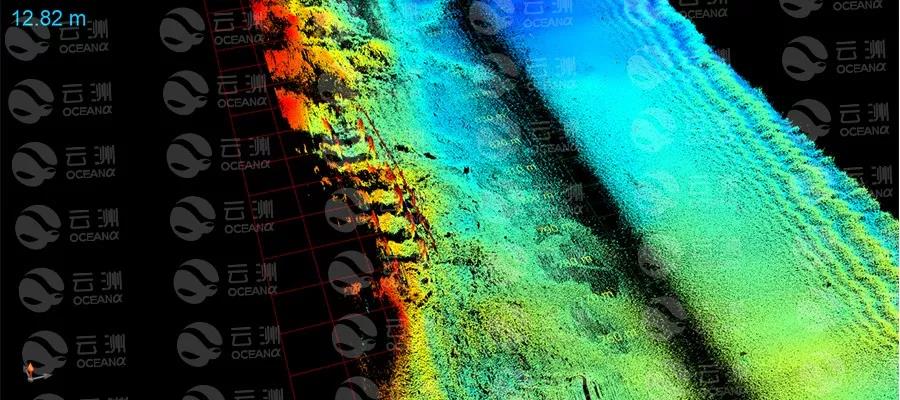
 Dock piles in Taishan harbor
Dock piles in Taishan harbor
 Dock piles in Taishan harbor
Dock piles in Taishan harbor
The breakwater and waste immersed pipes in Taishan harbor
Bridge pier of Longwan bridge
MS400 multibeam performance analysis
- Cross-section matching analysis
After data correcting and calibrating, surveyors checked the matching situation of the cross-section data of Foshan watercourse and Taishan harbor respectively. A satisfying result was concluded from the following images. 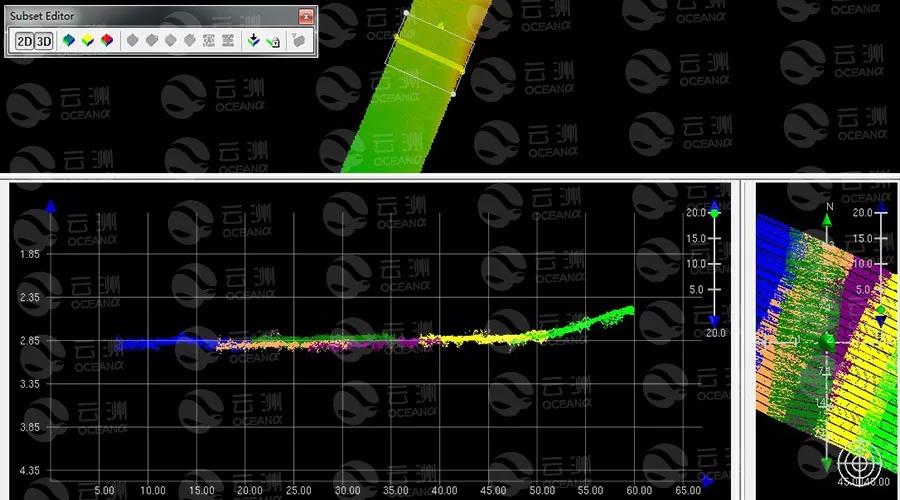
data matching output of Taishan harbour
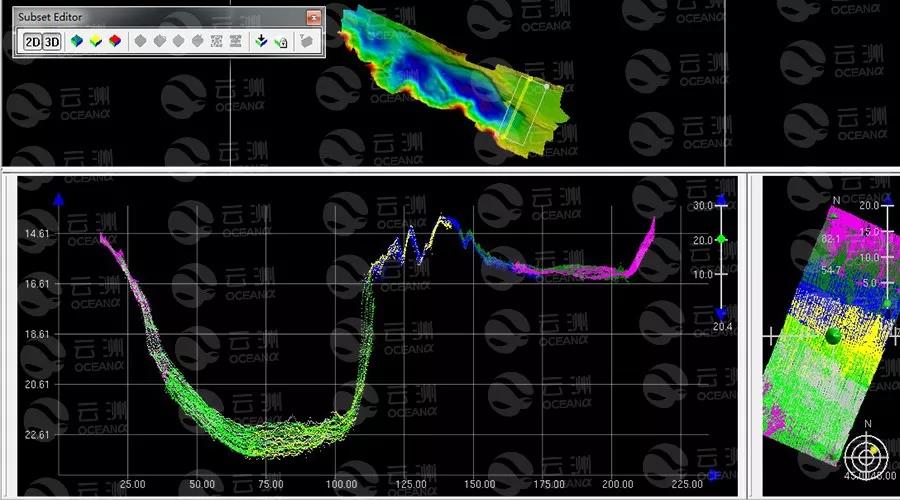
data matching ouput of Foshan watercourse
- Multi-beam precision analysis of Foshan water course
Using the quality control function that comes with the CARIS software, surveyors analyzed the accuracy of the data of overlapping area basing on the IHO super-accuracy standard. The terrain of Foshan watercourse is complex and the topography changes frequently, to demonstrate the survey result accurately, surveyors processed the statistical analysis with a square mesh size of 0.1 m. The result is as follows: 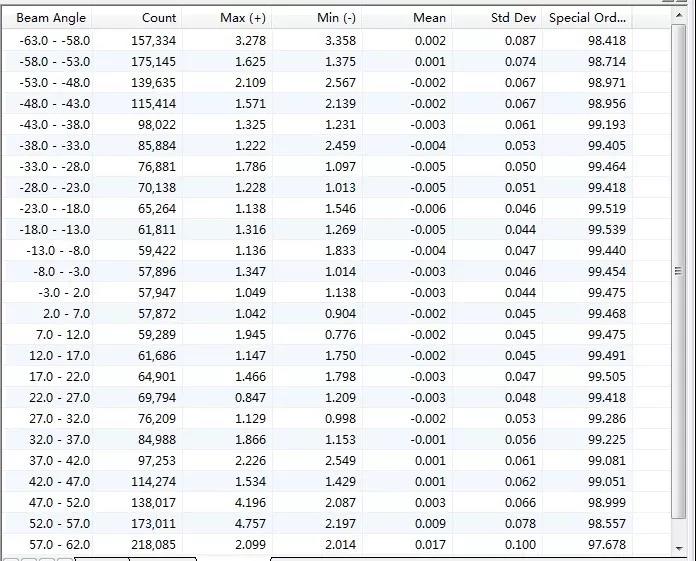
The analysis result with mesh size of 0.1 m
From the above chart, it can be seen that all data meets the accuracy standard.
2. Multi-beam precision analysis of Taishan harbor
Since the underwater topography of the Taishan harbor is relatively flat, surveyors established the statistical analysis with mesh size of 0.1m*0.1m and 1m*1m respectively. The results greatly excelled the IHO measurement accuracy standards. 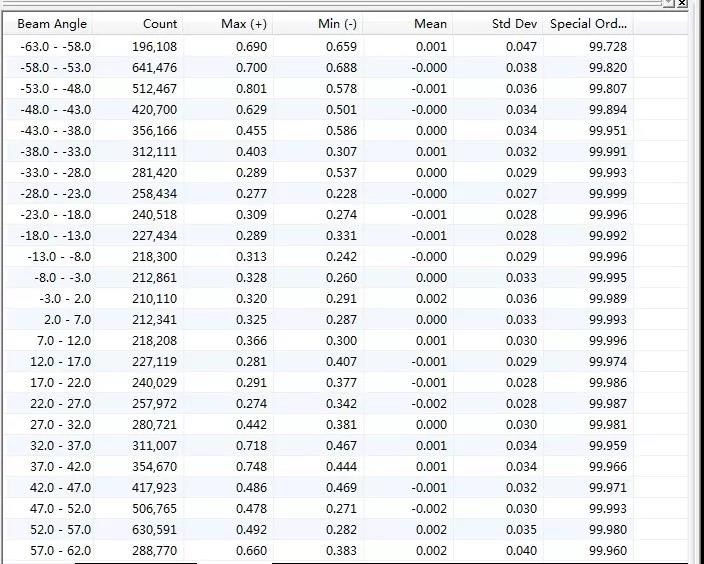
The analysis result of the 1m*1m mesh size
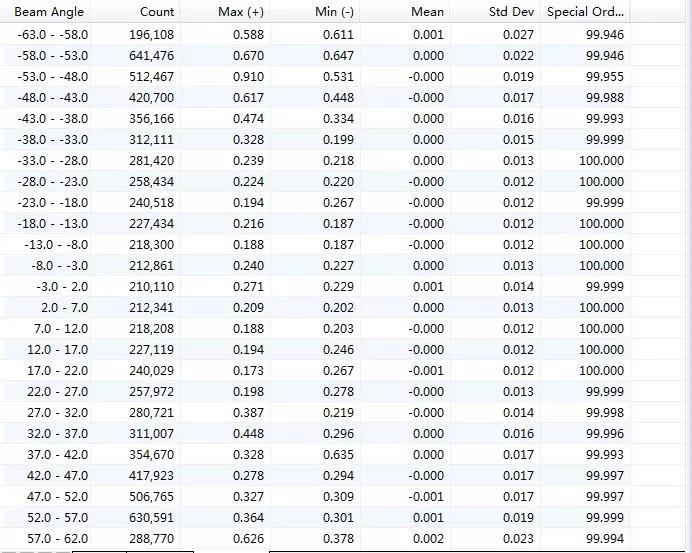
The analysis result of the 0.1m*0.1m mesh size
Through the field-work modeling function of the CARIS software, a 3D surface model of the survey area is generated as follows. 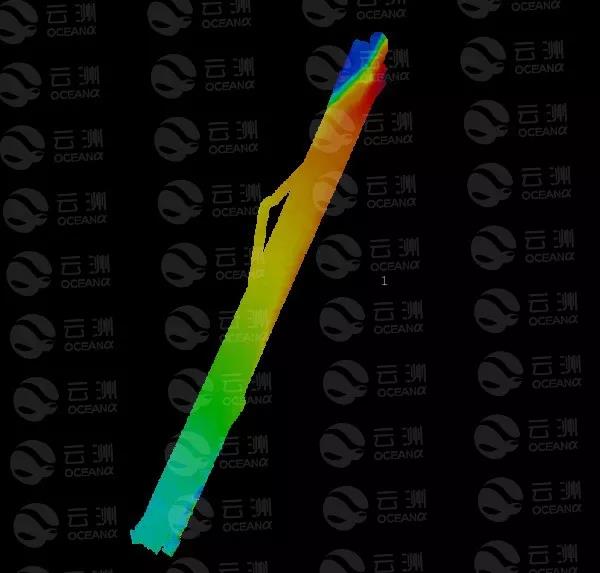
The 3D mapl of Taishan harbor
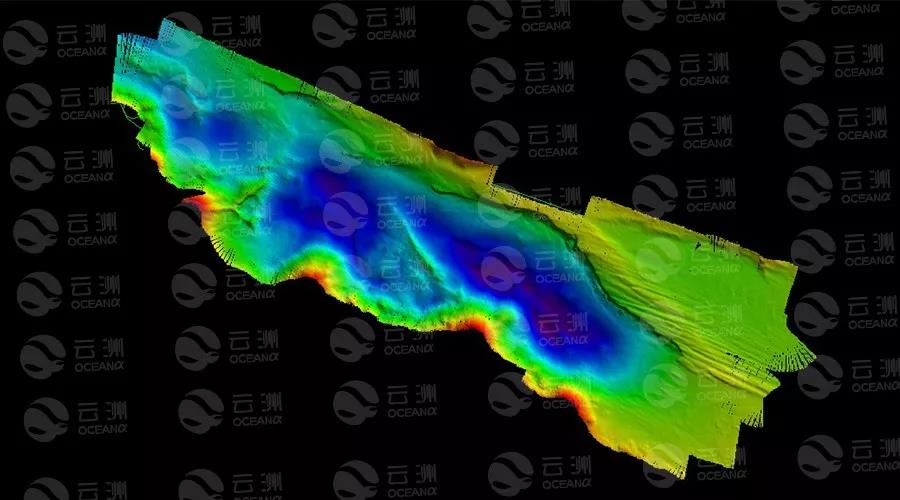
The 3D map of Foshan watercourse
The mission shows that the M40 USV is easy to be launched and retrieved, and can conduct underwater multibeam survey and side scan detection in complex river and harbour environments. With a excellent mechanical design, the M40 USV generates little noise while sailing which provides an ideal working environment for the acoustic equipment. Data collected by the M40 USV is in excellent quality, meeting the IHO44 premium standard and China’s Hydrographic Measurement Norms.
Conclusion
- Strong capacity. The dual-system hull and large equipment cabin space ensures the strong payload capability of the M40 USV. Its hull platform, power system, control system and surveying system are completely modulated thus ensures its maneuverability, maintainability and serviceability. The USV can be equipped with multiple equipment such as multibeam echo sounder, side scan sonar, ADCP, water quality online monitor, etc.
- High accuracy. The survey is conducted under a level 2 sea state. Under the influence of passing ships, berthing ships and river water flow, the M40 can still maintains its navigation deviation within 1 meter, effectively improves the accuracy of data-collecting. Its collected data quality meets the IHO44 premium standard.
3. Perfect for shallow water survey. M40 provides a ultimate solution for near-shore shallow water survey. With a draft shallower than 0.5m, M40 can be working on most shallow water area where manned boats are too heavy to enter, which could effectively expand the survey area and makes a full coverage hydrographic survey possible.
Related Applications
We’d love to hear from you
Whether you have a question about features, trials, pricing, need a demo, or anything else, our team is ready to answer all your questions.
