Date: May 2020
Location: Nangoumen Reservoir, Shaanxi Province
Equipment: OceanAlpha ME120 unmanned surface vessel(USV/ASV) platform
Hydro-tech MS400P small multi-beam sounding system
User: National Natural Resources Second Topographic Surveying and Mapping Team
Background
The total storage capacity of the Nangoumen Reservoir Project is 20006 million cubic meters. It is a second-class water conservancy project in China.
The Second Topographic Surveying and Mapping Team of Natural Resources used advanced intelligent equipment such as unmanned ships and drones to conduct topographic surveys on the Nangoumen Reservoir. Smart devices perfectly address the pain points of heavy workload and high risk of traditional manual mode, and effectively expand the coverage of survey.
The underwater terrain mapping was conducted by an OceanAlpha ME120 automatic surface vessel. The unmanned vessel was equipped with a small multi-beam sounding system to collect high-precision data of about 7 square kilometers, providing a comprehensive data support for the operation and management of the reservoir.
Working Process
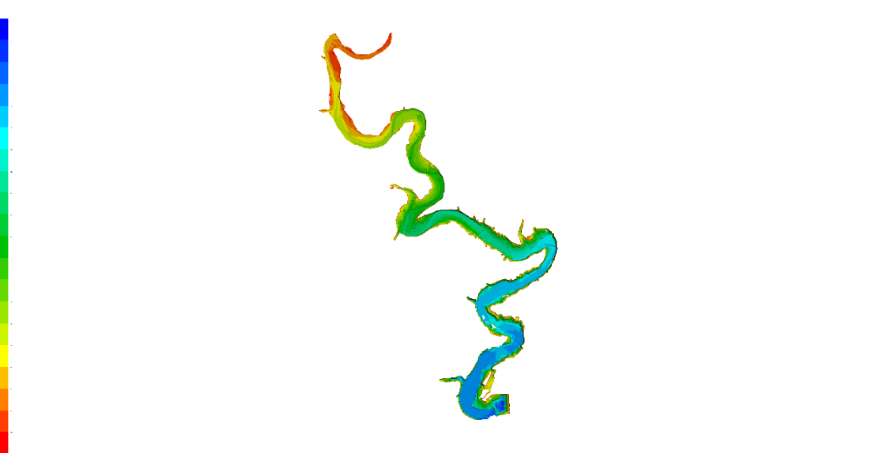
The total length of the target reservoir is about 16km, covering an area of about 7 square kilometers.

Google map of the survey area
After surveyors transported the ME120 USV platform and related survey equipment to the pier, they quickly assembled the entire measurement system.
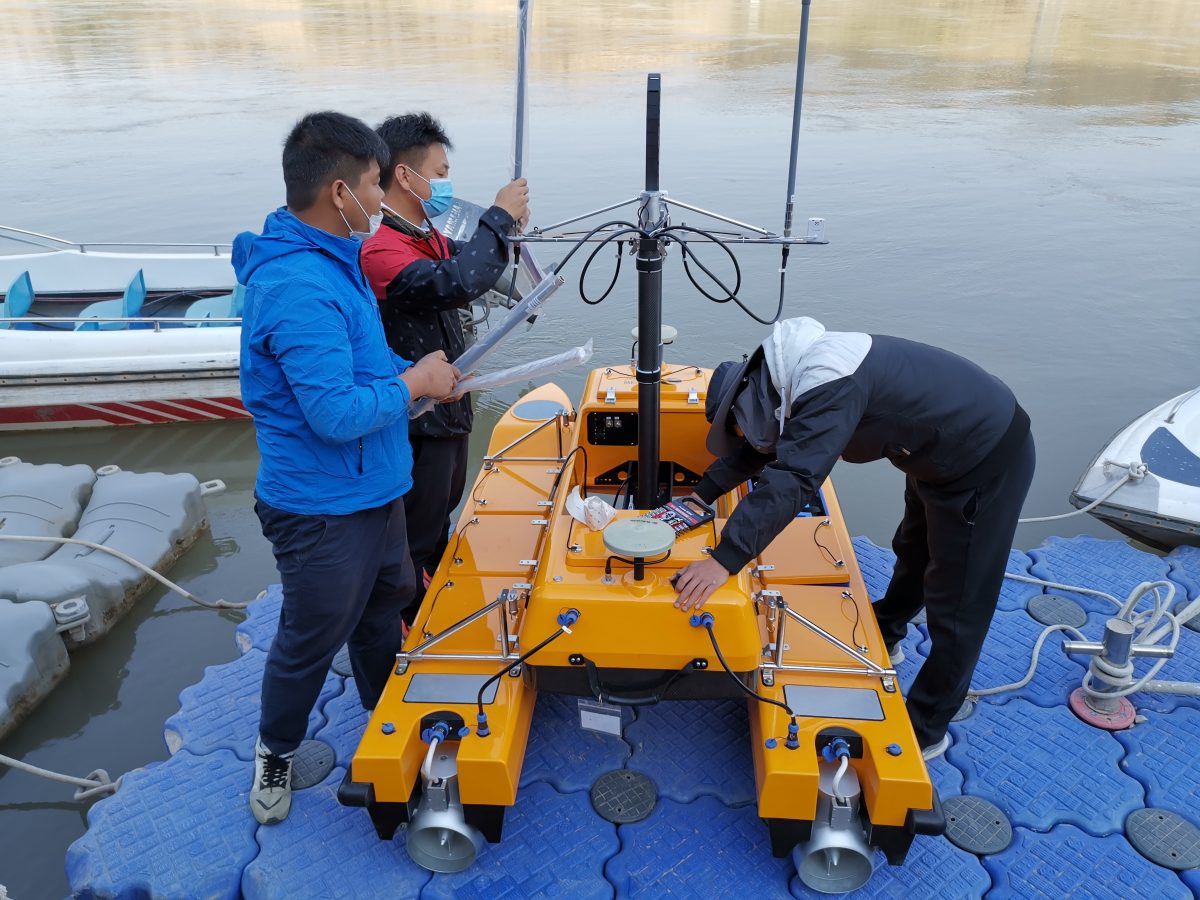
Surveyors installing the ME120 USV and multi-beam sounding system at the dock
ME120 is mainly composed of four parts: left and right hull, middle compartment and lifter. Based on its modular structure design, the on-site assembly of the entire measurement system is very simple. Disassembly or installation can be completed by using 1 set of inner hexagon, saving a lot of time for site preparation.
The multi-beam transducer is installed at the bottom of the lifter. During the mapping process, the surveyor can remotely control the lifter through the shore base station to raise or lower the transducer, so as to avoid the transducer being collided by unknown underwater objects during navigation.
Surveyors operate and debug the USV and multi-beam sounding system
After the test, the unmanned ship began to perform underwater terrain mapping tasks. According to mission requirements and on-site conditions, the surveyor used unmanned ship base station software to lay out test lines and sent them to ME120 USV for execution.
When the unmanned ship is carrying out mapping navigation, surveyors can monitor the data collection situation in real time on the shore-based base station, and observe the surrounding environment of the USV through the video returned by the ship-side camera. According to the returned water depth and surrounding environment video, the surveyor can change the mission instructions of the unmanned ship in real time.

ME120 US automatically performs mapping task
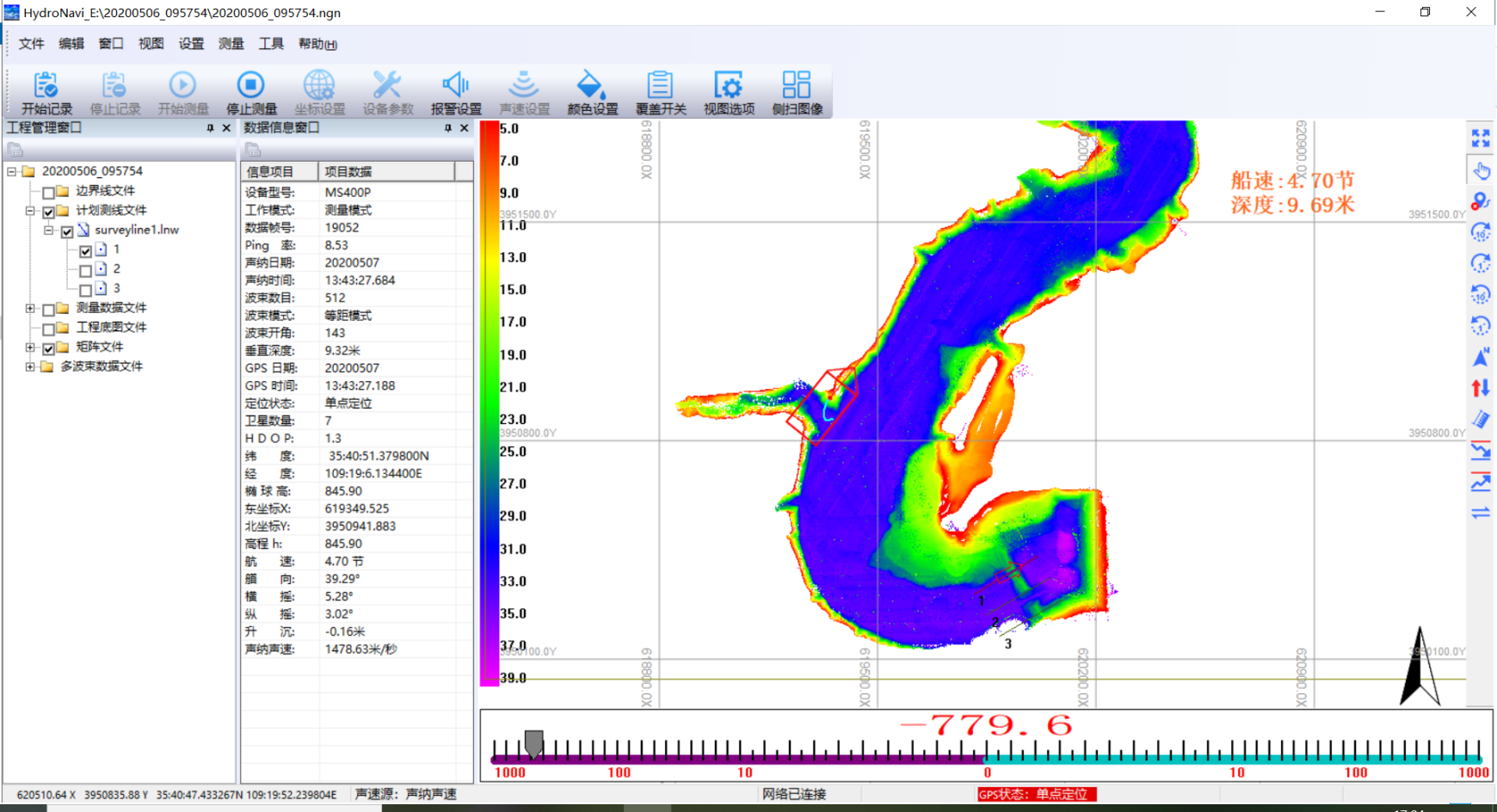
The interface of multi-beam bathymetry system
Mapping results
3D top view of Nangoumen Reservoir
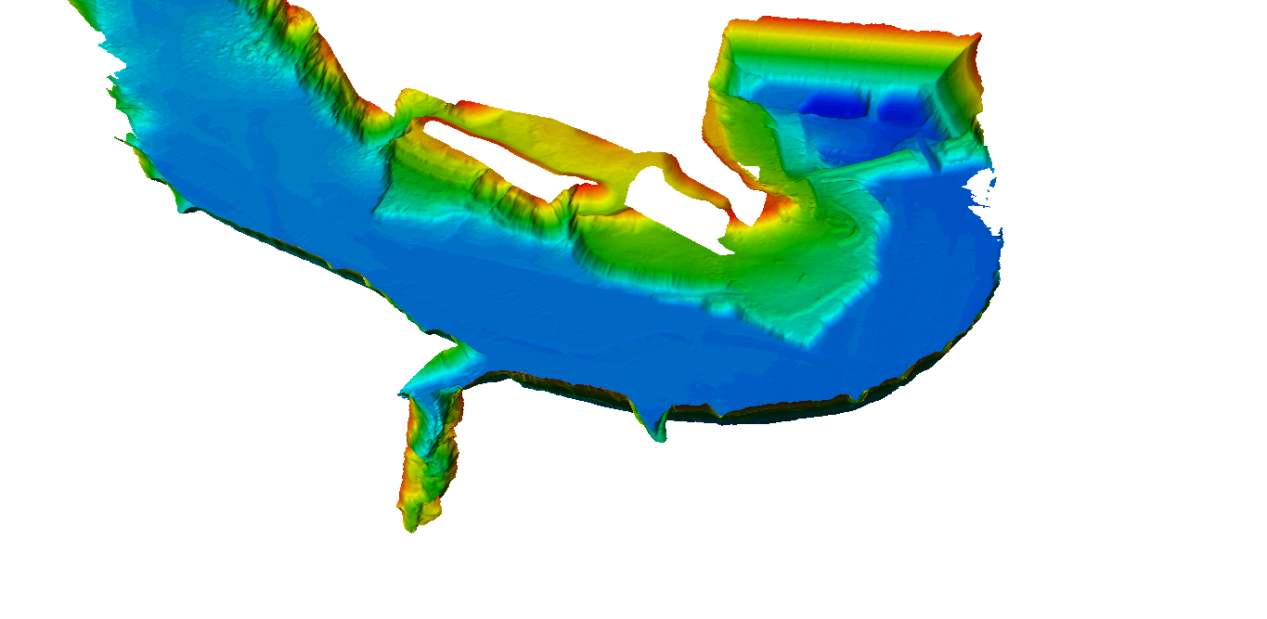
Underwater landform map of the reservoir
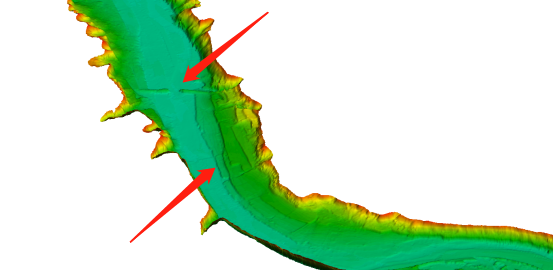
Broken bridge at the bottom of the river and flooded terraces
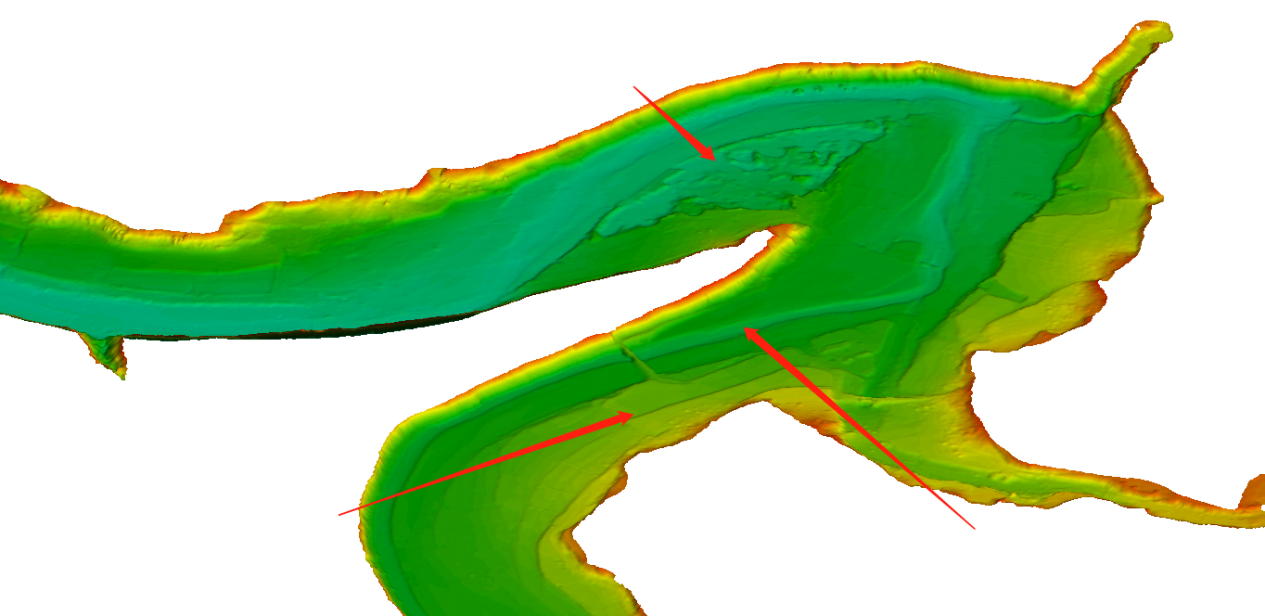
Scoured gravel bottoms, old river channels, and flooded terraces of the reservoir bed
Related Applications
We’d love to hear from you
Whether you have a question about features, trials, pricing, need a demo, or anything else, our team is ready to answer all your questions.
